Post provided by David Villegas Ríos
David Ríos tells us about investigating the movement of aquatic animals using telemetry technology and the new Methods article ‘Inferring individual fate from aquatic acoustic telemetry data’.

Aquatic animal telemetry has revolutionized our understanding of the behaviour of aquatic animals. One of the important advantages of telemetry methods, including acoustic telemetry, is that they provide information at the individual level. This is very relevant because it enables investigating the natural variability in behaviour within populations (like here or here), but also because one can investigate what happens to each individual animal and relate it to its natural behaviour. Knowing “what happens to each individual” is normally referred to as “fate” and it can take many forms: some fish may end-up eaten by predators, other may be fished, some of them may disperse, etc. Knowing the fate of each individual fish is crucial as it links ecological processes at the individual level to evolutionary outcomes at the population level.

Types of telemetry arrays
There are virtually as many types of telemetry arrays as a researcher can dream of (reviewed here) and acoustic receivers are usually set according to the research goals. Researches tracking migration routes in the sea or in freshwater systems typically deploy curtains of receivers that will inform when a fish moves through some specific areas. In other cases, receivers deploy sparse networks of receivers covering large areas to track animals that presumably move a lot. In fact, more and more international telemetry networks, where telemetry users share infrastructure and data, have been set up in recent years (e.g. ETN, OTN). An alternative that has become popular to track less mobile and coastal species is the deployment of telemetry arrays with receivers overlapping their detection ranges (i.e. full coverage telemetry arrays). When acoustic receivers are close enough to each other, any single transmission by a fish moving inside the telemetry array will be picked up by at least one receiver, and probably more than one. This has the advantage that the fish can be positioned in a continuous pattern if it doesn’t leave the area covered by the receiver array . This type of array is very useful for studies of fate and survival, as we describe in our recent publication.

Other common uses are in detailed studies of habitat selection or effectiveness of marine protected areas, to mention a few.
Inspecting detections to track fish fate inside telemetry arrays
When individuals are continuously tracked inside an array, it becomes possible to ascertain their fate with accuracy by just looking at and analysing the patterns of vertical and horizontal movements over time. This is not new. Telemetry researchers have been using the pattern of detections since long to investigate survival of different species directly in the wild (see examples with red drum, juvenile blacktip sharks or cod), although telemetry data were normally complemented with information from recaptures from fishers. However, there was not a general method that compiled and summarized the majority of the outcomes that one could expect for a tagged fish. In our method, we describe how to assign fate to individuals by answering eight simple questions. But let me guide you through the flowchart:

1. First thing we may want to know is if our fish survived the tagging process. Fish are normally tough but it may happen that right after tagging the fish stop moving. This is bad news, but we need to know it to exclude the fish from our analyses.
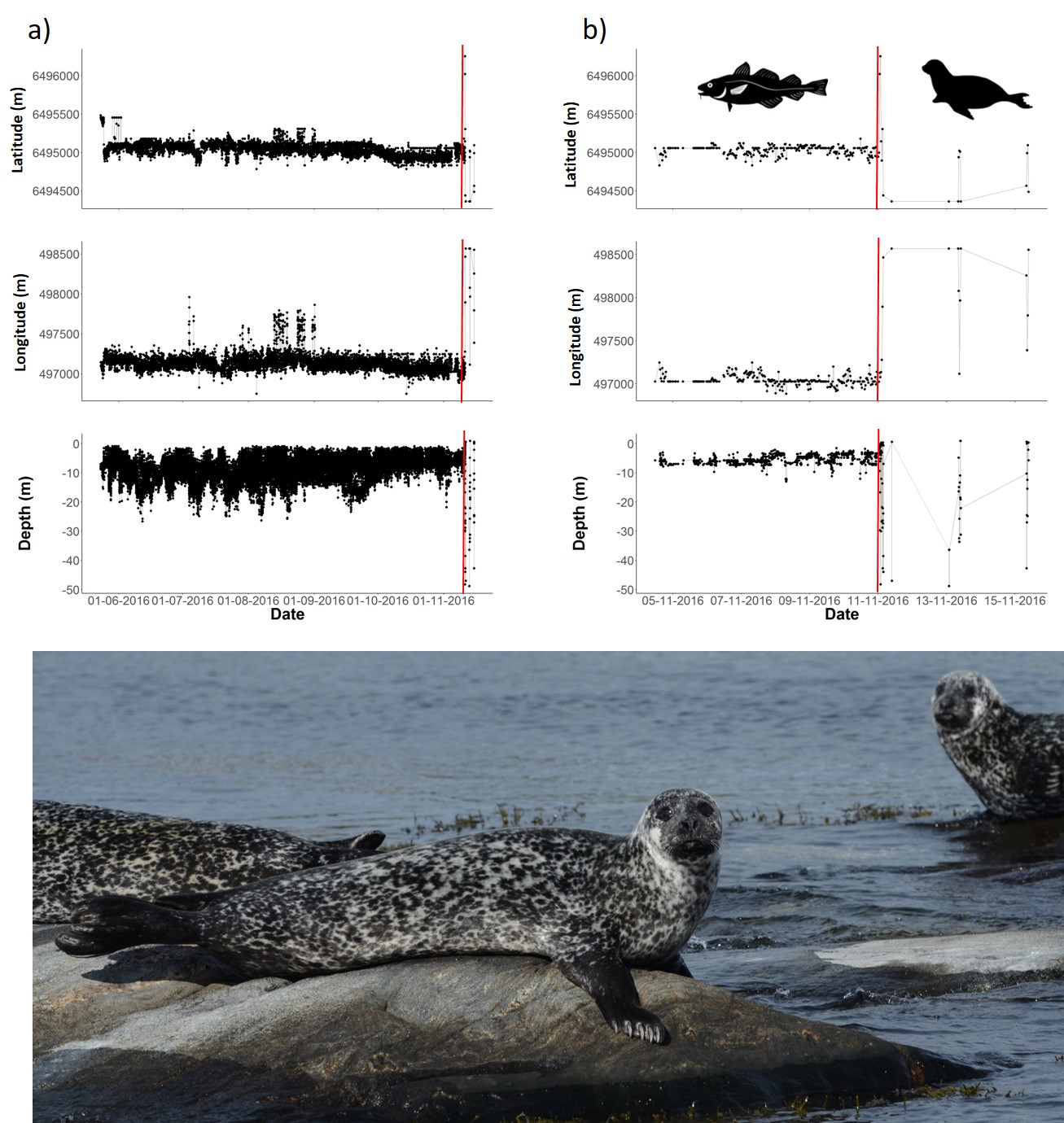
2. Once we know the fish is alive, we should be able to understand what is the normal behaviour for our species in the study area. We can obtain this information from previous studies or from our own research, if we have previously recaptured one or several individuals of the same species at some point after tagging. Then we should look carefully at the movement patterns. Are we able to detect any significant change that may suggest that the fish was eaten by a predator? For instance, predation by marine mammals can be recognized by frequent visit to surface (to breath).
3. Imagine we don’t recognize any predator pattern. In this case we may ask ourselves if data has been recorded until the very end of the equipment battery life. If the answer is not, then we may assume the fish left the system at some point. This may happen for two reasons: either someone fished it or it just swam out the array. Luckily, a detailed inspection of where the fish was last detected within the array (in the edge or deeper inside) can help us decide between these two scenarios.
4. However, if we have data during the whole battery life, we can only assume that the fish survived if we don´t observe anything weird in the detection and movement patterns, and everything is as expected. But sometimes this is not the case, as we can observe that the fish “suspiciously” stops moving at some point. Well, this case is tricky. It is logical to think that the fish has probably died. We could assume that the fish perished of natural reasons when movements are followed by a flat profile without big changes in the location of the fish.
5. Sometimes fishers catch the fish in one or several spots, but then gut it in a different spot, releasing the telemetry equipment back in the water. Perhaps both spots fall inside the telemetry array. Then the “normal” profile and the flat profile will be observed at different locations and we could infer that the fish was harvested.
I always feel like an inspector when I look at the different horizontal and vertical profiles of the different fish, and I think there is so much that can be understood just by looking at those patterns. As with any inspection, there is room for uncertainty as our inferences are based on unobserved processes. In our paper we show how the same patterns are repeated once and again in a large sample of cod from Norway and we provide confirmation of the assigned fate based on other sources of data (e.g. recaptures from fishers, self-recaptures). Having observed such clear patterns repeatedly over time and on many different species of fish (although in the paper we only use cod to exemplify the method) was the trigger to write this methods paper that we hope other researchers find useful in their studies.
To find out more about aquatic animal telemetry methods, read the Methods in Ecology and Evolution article, ‘Inferring individual fate from aquatic acoustic telemetry data’
