Post provided by Jamie Macaulay

Entanglement in net fisheries (static and drift) is the largest known cause of direct anthropogenic mortality to many small cetacean species, including harbour porpoise (Phocoena phocoena), in UK waters. Despite this, little is known about the behaviour of small cetaceans in proximity to nets. In this blog post, Jamie Macaulay discusses the findings of his Methods in Ecology & Evolution paper ‘Passive acoustic tracking of the three-dimensional movements and acoustic behaviour of toothed whales in close proximity to static nets’ .
Gill nets and entanglement rates
Gill netting is a type of fishing method which works by catching fish which passively swim into a net that is positioned much like a badminton or volleyball net. The nets are stationary, meaning they stay in the position on the seabed or float on the surface. Once a fish swims into the net, it becomes entangled and cannot escape. In many ways this is a great form of fishing; unlike bottom trawling, which causes damage to the seabed, reducing biodiversity and releasing significant amounts of carbon, gill nets should be a comparatively benign form of fishing. Unfortunately, every form of fishing has some downside and there is indeed a significant conservation problem with gill nets – bycatch. Bycatch is when a non-target species (e.g. birds, turtles, whales) accidently become entangled in the nets and drown/suffocate.
Many species are particularly vulnerable to bycatch in gill nets and including a number of species of toothed whales (particularly marine and river dolphins, and porpoises). In fact, it is estimated that over 200,000 dolphins, river dolphins and porpoise are bycaught every year, making bycatch, by far, the largest direct human-made conservation issue for toothed whales. It’s such a huge issue that at least one species (the Baiji dolphin) is already extinct in part due to this threat, and two more (the vaquita and Maui’s dolphin) are on the verge of extinction primarily due to excessive bycatch in gill nets. Such a catastrophic conservation problem has rightly prompted research into how bycatch can be reduced. So far, the only reliable methods seems to be to close fisheries or, for some, species, a mitigation method has been to use pingers (devices which produce loud sounds) to warn animals of danger ahead.
However, whilst this research has been welcome, there have been very few studies into why dolphins and porpoises get entangled in gill nets in the first place They have an extremely sophisticated biosonar, regularly production of echolocation clicks to sense their surroundings and hunt for prey. We know that dolphins and porpoises can acoustically detect nets, so why do these seemingly highly intelligent animals keep swimming into them? Most research to date has focused on trying to find ways to prevent bycatch, but comparatively little has sought to understand the mechanism behind it – which may help us develop better methods to stop it in the first place.
Understanding toothed whale behaviour around gill nets
In 2017, we began a project to try and understand the events leading up to bycatch in an effort to better comprehend the causes of bycatch itself. To do this, we determined that we would need to track wild animals around gill nets, collecting precise data on their 3D movements and acoustic behaviour. Listening to their vocalisations would tell us what animals are doing (e.g. hunting, communicating, etc.) and the 3D movements would allow us to figure out how they become entangled in the nets. But how do we go about collecting this type of information? We thought about video camera but the visibility in northern European waters, where our study was focused, is not particularly good and underwater video cameras do not produce viable images at night. Biologging tags (devices we put on animals) were considered as a possibility but we don’t have any whale-tagging programs in the UK and even if we did, the chances of a tagged animal encountering a specific gill net would be low – we would have to tag lots of animals which is not easy and not cheap. Another possible option was to use the echolocation clicks that toothed whales produce in order to track them passively. If we can record the clicks on multiple underwater microphones (hydrophones) we would be able to triangulate the position of animals with each click they make. This was the best (and our only) option to get the kind of behavioural data we needed. However, building this passive acoustic monitoring system (PAM) would not be easy.

Our basic idea above was to create a device with 4 closely spaced hydrophones along with a super accurate orientation/depth sensor. The 4 hydrophones and orientation/depth sensor meant that, when the device recorded a click, we would be able to determine the geo-referenced (relative to North) horizontal and pitch angle to the dolphin/porpoise. If two devices were deployed on a net separated by, say, 30m, then, when a click was detected on both devices, there would be two bearings to the animal – the point at which bearings cross would then the 3D location of the porpoise/dolphin. As dolphins and porpoises produce regular clicks, we would be able to get multiple locations and track the animal as they pass the net. A relatively simple concept, however, there were some serious technical challenges to overcome.
Harbour porpoises produce narrow band high frequency clicks at 130kHz – that is well over six times the highest frequency a human can hear. To record these clicks we would need an underwater device that could make well over a quarter million measurements per second per hydrophone – with four hydrophones that’s ended up being 1.4 million measurements per second Added to that, this system needed to be easy to deploy from a fishing vessel. There were no off-the-shelf recording systems which came anywhere near these criteria and so we decided to make our own (below).
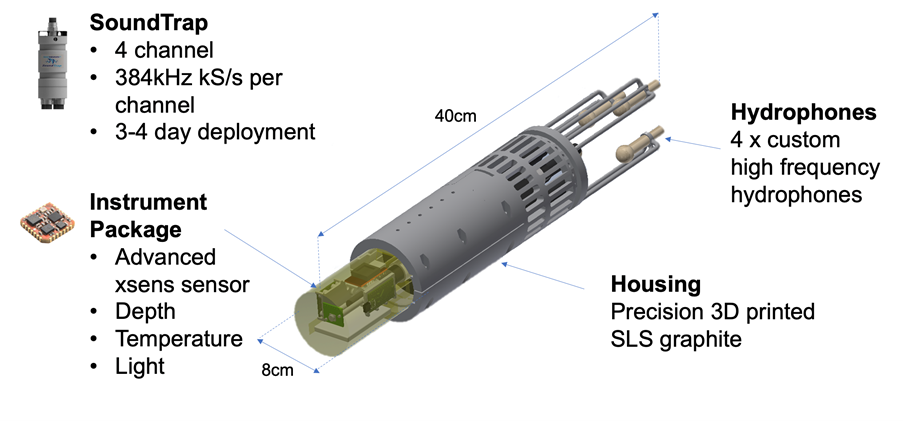
We based our system the 4-channel SoundTrap from Ocean Instruments. This state-of the-art device is one of the most advanced multi-channel autonomous underwater recorders available, but more importantly, it’s open-source! That meant we could get right into the firmware of the device, which we needed to do to allow us to record orientation data. The SoundTrap actually has it’s own basic orientation sensor but we required something more accurate to allow us to calculate precise geo-referenced bearings. After some searching, we settled on the xsens MTi-3. Not only is this sensor tiny (the size of a thumbnail) but it does a bunch of sensor fusion calculations on board which compensate for many of the usual pitfalls of high precision orientation sensors. With open-source firmware of the SoundTrap and some electronic board fabrication based on Arduino tech, we were able to integrate the xsens sensor into a SoundTrap, allowing us to accurately time synchronise the orientation data from the xsens and the acoustic data from the SoundTrap.
With the electronics done, we then needed to make the whole thing waterproof. We potted the xsens sensor into a sensor package and then 3D printed a frame to hold the SoundTrap, sensor package and hydrophones together. 3D prints aren’t particularly robust, so we put the whole thing inside some HDPE pipe – this is widely available because it’s used everywhere but, it’s also acoustically transparent – the perfect material for underwater acoustic studies! We dubbed our open-source design the “SoundNet”. We intended to deploy 2 devices, each consisting of 4 hydrophones, on a gill net.
SoundNet deployment and analysis
With our devices ready to go, we enlisted the help of a local gill net fisherman in Cornwall, UK, who agreed to deploy our SoundNet devices on his gill nets. Our compact design, which each device being about the size of a bottle of wine, made it easy to attach two devices to the top of the gill net while it was being deployed into the water. We carried out four gill-net deployments in total and managed to record 13 harbour events over 176 hours. This combination of successful hardware development and fisherfolk cooperation was no easy feat, but this was only half the battle.

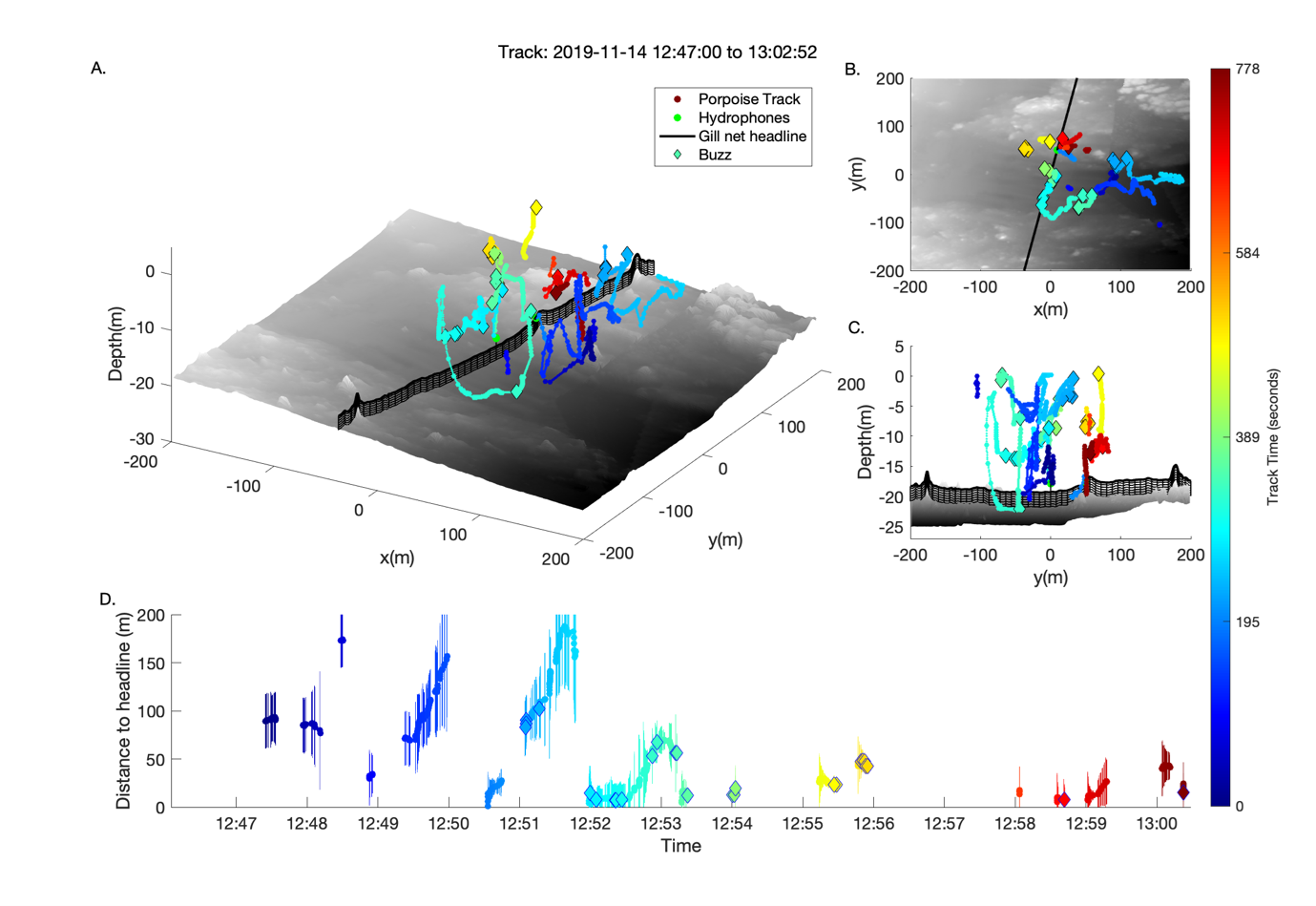
Our next step was to determine how to analyse these data. Harbour porpoises click multiple times per second and manually going through 176 hours of eight channels of high-frequency data manually is simply not feasible, therefore we would need some automated analysis algorithms. We turned to another open-source solution, PAMGuard, a bioacoustics analysis toolbox which is designed for churning through high-frequency acoustic data to detect dolphins and whales. PAMGuard automatically detected the tell-tale clicks of harbour porpoises, allowing a manual analyst to rapidly identify sections of the data where we might be able to track animals around the gill net. We found 13 such sections and, with some nifty localisation algorithms, converted our acoustic and orientation data into location data. This allowed us to get our fine scale 3D movement and acoustic behaviour around gill nets.
7 days of data from similar locations isn’t exactly the largest dataset in the world, but, even these initial results showed us some interesting behaviour. We saw examples of porpoises avoiding the nets, as we might expect, but also spending significant periods of time around the net (below). Those that were near the net were making click patterns that indicated they were foraging, suggesting that, perhaps, prey aggregating around the gill nets attracts porpoises. We need way more data to make any concrete conclusions on the broadscale behavioural influences of gill nets on porpoises, but this project showed a proof of concept. That is, we can now, relatively inexpensively, collect fine-scale behavioural data around gill nets, opening a whole host of possibilities to try and unlock the deadly mechanism(s) behind bycatch.
To read the full paper ‘Passive acoustic tracking of the three-dimensional movements and acoustic behaviour of toothed whales in close proximity to static nets‘ click here.

.jpg){kind=link}