
Post provided by Charlotte Christensen (she/her) and Damien Farine (he/him)
Miniaturisation of technology has made GPS tags increasingly accessible for studying animal behaviour. However, limitations in battery life introduces challenging trade-offs in data collection. In this blog post, Charlotte Christensen and Damien Farine discuss how these sampling trade-offs can impact studies that use GPS tags to study social animals.
Using GPS trackers to study social animals
The rapid consumerisation of mobile phones has led to a technological arms race among manufacturers to develop the best features at the cheapest price. This has benefited not only consumers, but also ecologists, conservationists and animal behaviour researchers through the miniaturisation of high-end electronic components, including GPS modules and batteries. Any ecologist who has spent long days and nights trying to locate animals using VHF radio trackers, will have thought to themselves: “if only I could press a button and download where this animal went remotely”. Indeed, the idea of a tag that can collect continuous movement and even behavioural data (from on-board accelerometers) for multiple individuals simultaneously, is a research dream come true for many of us.
The last decade has seen a boom in companies providing ready-to-deploy GPS tags that can be fitted on large numbers of animals, and an increasing number of studies use these to study group-living species. However, GPS tags were not necessarily designed with the aim of studying social behaviour. Early studies were primarily concerned with understanding where animals moved in relation to their physical habitat, often over large scales (such as during migration). This contrasts sharply with movements made in response to the social environment, which take place at much finer scales and are much more dynamic over time.
This new application raises a number of unique challenges, and these require considerations beyond those applicable to single tags, which typically involve calculating the inherent GPS location error of a single animal. Further, sampling limitations, namely related to limitations in battery life, introduce trade-offs in sampling design. To date, there is little guidance available in how such trade-offs might impact studies of social behaviour.
Sampling trade-offs
While miniaturisation has made electronic components very small and light, batteries have remained relatively heavy. Every extra milliWatt of power adds weight. This means that, to limit tag weight, researchers are typically faced with a trade-off: sample more often in a shorter period or sample more sparsely over a longer period. Tags are also costly, so researchers working with social groups also face the question of how many individuals they need to sample to acquire the data relevant to their research questions; should they sample more groups or more individuals per group?
A guide to sampling design for GPS-based studies of social behaviour
In our recently published paper at Methods in Ecology and Evolution, a team effort led by Peng He and James Klarevas-Irby, we collected field data and conducted simulations to better understand how decisions about sampling design—sampling frequency, sampling duration, and sampling coverage—affect GPS-based studies of social behaviour.
Higher sampling frequency (e.g. one location per second or per minute) substantially reduces the sampling duration (e.g. how many weeks or months of data can be collected). The optimal balance between these will need to take into account the ability to detect behaviours of interest (e.g. how long each burst of consecutive GPS fixes should be), the need for location data to be synchronised across individuals, the proportion of the day GPS data should be collected for, and seasonal changes in behaviour that need to be captured (or avoided).
For instance, studies investigating collective movement decisions will require bursts of consecutive fixes to capture this dynamic process, whereas constructing social networks can be done with single GPS fixes. Moreover, studies comparing social processes across different seasons might opt for sampling a smaller, but representative, time window per day to conserve battery. Habitat is also important, with vegetation cover affecting the performance of GPS tags, which has implications for between-tag synchronisation.
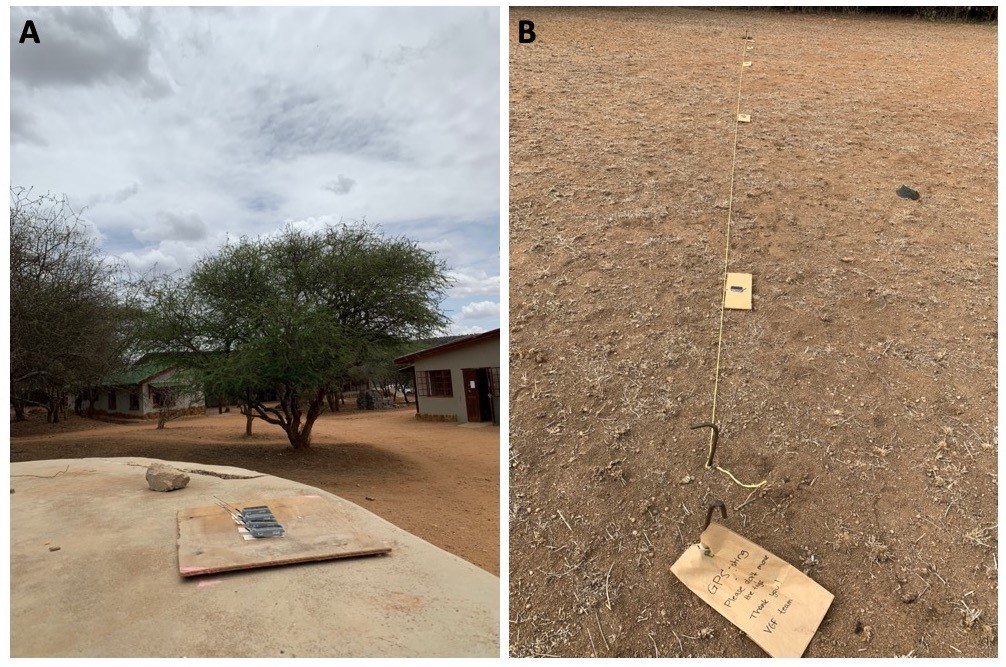
We placed tags in set locations (shown in image A) over several days to understand how GPS error is distributed (it is leptokurtic—or more peaked than a normal distribution) and how GPS error is affected by the inter-sample time interval (the longer the interval, the greater the error). We also tested how GPS tag error affects estimations of inter-tag distances across different inter-tag distances (shown in image B). The closer the tags are together, the greater the over-estimation in distance. We also conducted walking transects to test whether moving tags had lower inter-tag distance error than stationary tags (they did). The approaches that we used are easily implemented in just a few days, and provide a wealth of information about the expected performance of tags when applied to questions of social behaviour of animals in situ.
By trialling different GPS sampling regimes, we also discovered several new insights into how sampling frequency and duration can impact location error from each point, and the consequences that this has on inferring social behaviours (see below). The types of social behaviours (or group properties) that are being inferred from the GPS data are also highly dependent on the coverage of tags in a group (i.e. the proportion of individuals fitted with a tag).

We demonstrate this using whole-group tracking data from vulturine guineafowl (Acryllium vulturinum), by randomly sub-sampling GPS-data from just a proportion of the group. Some measures, such as the home range of a group, can be estimated with just one or two tags per group. Other measures, such as the spread of a group, requires a much higher proportion of group members to be fitted with a tag for measures to accurately estimate the true group behaviour. The good news is that the relationships between measurement accuracy and coverage is often highly predictable, and we provide several examples in which we predict this relationship using a combination of test data and simulations.
GPS synchronisation and location error affect estimates of social behaviour
GPS tags work by triangulating their position relative to satellites. The accuracy of this triangulation therefore depends on the number of satellites they can find. This, in turn, depends on how long the tag is on for (i.e. how much time it has to find satellites, at the cost of battery power) and any vegetation cover. By programming and ‘deploying’ off-animal tags in the field, we found that sampling design (longer inter-burst durations) and habitat clearly affect GPS location error, and that this has somewhat surprising consequences on estimates of social behaviour.
For example, tags in denser habitats take more variable amounts of time to find satellites, which reduces the synchrony in data collection among tags (if these were programmed to collect data at the same time). Further, cover increases the error in position estimates, as does having a longer time during which the tag is switched off between GPS fixes.
We also discovered that positioning error is critical for estimates of social behaviour, because the greater the error in the positions – the more the distance between two tags (i.e. individuals) is over-estimated! (Since the publication of our paper, we discovered a very detailed study on this overestimation effect). Of importance for studies of social behaviour, the relative size of this unintuitive effect is greatest when individuals are closer together—exactly when we need to have the best available estimates to infer social contacts or social interactions.
However, it’s not all bad news, because when tags are closer their errors are also more correlated, which somewhat reduces the magnitude of the error. Interestingly, we found that when tags were moving, the correlation in their errors was substantially higher, thereby further reducing the over-estimation error in the distance between tags. Studies will need to account for this biased (over-estimation) error when using GPS data to infer social behaviours. This might be as simple as setting an adjusted threshold—larger than the true threshold—when inferring two individuals might be in contact.
Taken together, our findings mean that the context in which social behaviours are expressed matters for GPS error estimates. Two monkeys huddling together under a tree canopy will have higher GPS error than two monkeys walking across the savanna together, but some distance apart. While these positional errors are to some extent acknowledged in the GPS literature (e.g., by reporting overall GPS accuracy), they are not explicitly translated to estimations of inter-individual distances, nor have they been incorporated in any data analysis (e.g., by setting different proximity thresholds based on habitat or speed), as far as we know.
Looking to the future
Using GPS tags to study social behaviour is not easy, and not cheap, but it does bring substantial benefits. The ability to simultaneously record where each individual moves—and thus how members of the same group move relative to each other—has made previously intractable questions possible.
One example of this is the ability to infer how groups make decisions. With the integration of additional sensors on tags, such as accelerometers, it is also becoming increasingly possible to infer what individuals are doing, from which we can then extract not only if individuals are in proximity but also if they are engaging in social behaviours, such as grooming in mammals.
Our study raises a number of considerations that, to date, had received little attention. These considerations also apply to other types of tags, such as the ATLAS tags discussed in a previous blog post. While we could not provide definitive guidelines for all research questions on social behaviour for which GPS (or other) tags could be used, we hope that the design of our data collection and simulations will, at the very least, provide a useful starting point for researchers designing their study on the wonderful workings of animal societies.
About the lead authors
Peng He is a theoretician interested in the interface between the social and spatial factors that shape animal behaviour. He did his PhD and first postdoc at the Max Planck Institute of Animal Behavior where he studied how the configuration of landscapes can generate structural patterns in animal social networks. He is currently a postdoc at the University of Cambridge, where he is applying his skills to questions about life history evolution.
James Klarevas-Irby is fascinated by how animals acquire and use information about the broader landscape in which they live. He did his PhD and first postdoc at the Max Planck Institute of Animal Behavior, working on dispersal and other large movements in vulturine guineafowl. He will shortly head for a second postdoc at the Australian National University where he will apply his ideas to address outstanding questions about movements by Australia’s avian pollinators.
Read the full article:
“A guide to sampling design for GPS-based studies of animal societies”
